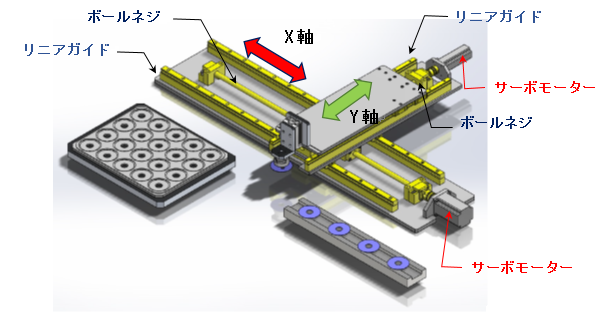
前回は、移動要素であるボールネジの選定をしました。これで、その前のリニアガイドと合わせて、移動部は意図した速度で意図した量を移動できるようになりました。
この状態で、ボールネジ軸端を手で回しても移動部は動きますが、今回はその動力源として、サーボモーターの選定をしていきましょう。
目次

1. サーボモーターとは
近年、自動化機械(FA機械)では、1つの装置で多品種の生産や、タクトタイムの短縮が求められるようになりました。その為、これまで汎用モーター(インダクションモーター)駆動と停止センサーによる制御やエアシリンダを使用した駆動では前述の対応が難しくなりました。そこで、速度や位置を自由に制御できるサーボモーターを使用することが増えています。
サーボモーターと汎用モーターの違い
ピックアンドプレースユニットのような装置の駆動源として使用されることの多い、サーボモーターですが、汎用モーター(インダクションモーター)と比較して、何が違うのでしょうか?
この2つのモーターは、内部構造(コイルとマグネットの配置)も異なりますが、一番異なるのは、(ロータリー)エンコーダーを持ち、モーター自身が位置を把握できることです。
そして時間当たりの位置の変化量から速度(回転数)を計算することが出来ます。
これによりサーボモーターは目的の位置へ狙った速度で対象物を移動させることが出来ます。
サーボモーターを使用する際は、下記のようなシステム構成で使用されます。
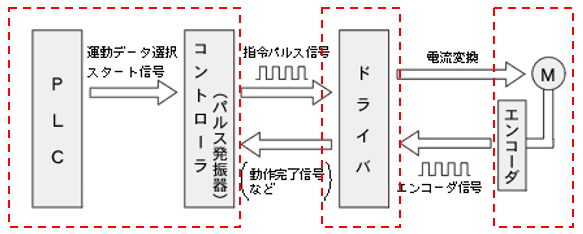
位置制御の例
機械や制御盤を覗いて見えるのは、赤く囲んだ機器とそれらを繋ぐケーブル類になります。
PLCとコントローラーは一体の場合やベースユニットにスロットとして装着されています。
ドライバ(アンプ)は制御盤内に、モーター、エンコーダーは機械に装着されています。
PLC (コントローラー) はドライバに対して指令を出します。
ドライバはその指令に従って、モーターに電流を流し回転させます。
モーターが回転すると、機械は移動しエンコーダーから信号(パルス)がドライバに伝達されます。
(帰還パルス)ドライバは指令した目標位置と帰還パルスとの照合を行い、過不足があればその分を再び電流としてモーターに流します。
サーボモーターは、以上のような制御を1ms(1/1000秒)以下のサイクルで繰り返しています。
2. サーボモーターの種類
サーボモーターには、回転型とリニア型の2種類があります。
(ダイレクトドライブ型もありますが、種類も少ないのでここでは省略します)
回転型サーボモーター
一般的に使用されるのは回転型のサーボモーターです。
回転型サーボモーターは駆動部(コイル)とエンコーダーが一つのボディに集約されています。
形状が決まっていますので、設計する際にも検討しやすくなっています。
また、制御面ではエンコーダー内部にモーター情報が書き込まれており、ドライバと接続すると自動認識するようになっているものが多くあります。
リニア型サーボモーター
次にリニア型ですが、ここ数年で単軸アクチュエータに採用されたりして目にすることが増えました。
簡単に言うと、リニア新幹線です。
(コイルと磁石の配置が異なりますので厳密に言うと違います)
可動子(コイル)と固定子(磁石)から構成されており、これらとガイドのみで走行することが出来ます。
また、固定子を延長することで、無限に長く走行させることが理論上可能です。
リニアサーボはエンコーダーを装備していませんので、別途手配することが必要です。
リニアエンコーダーと言いますが、検出方式(磁気式、光学式)精度、分解能が様々ありますので、必要に応じて選択します。
回転型サーボとリニアサーボの一番の違いはエンコーダーが検出しているものの違いになります。
回転型サーボはモーター軸の位置(角度)を検出していますが、その先負荷の位置は正確には見ていません。
例えば、カップリングが滑ると、エンコーダーが示す位置と実際の負荷の位置は異なってきます。また、ボールネジを使用した機械ではボールネジの熱膨張による誤差量を検出することは出来ません。
対して、リニアサーボの場合、エンコーダーは負荷の実際の位置を検出しています。
従って、エンコーダーが示す位置は正確に負荷の位置になります。エンコーダー自身も熱膨張の少ない素材(ガラスなど)で出来ており、高い位置精度での検出が可能です。
以上のような違いがありますので、その時の必要な条件に合わせてモーターを選択します。

3.サーボモーターの選定に必要な計算
サーボモーターを選定する際に必要な計算は色々ありますが、まずは次の2点の計算を出来る様になっておけばよいと思います。
- 慣性モーメント
- 加速トルク
使用条件などにより他にも必要な計算はありますが、そこは追々覚えてもらうとして、まずはこの2点について計算を出来る様になっておきましょう。
1.慣性モーメント
慣性モーメントの計算で覚えておいてほしいのは、
A)回転体(円板など)の計算
B)減速機を介した時の計算
C)移動部の慣性モーメントの計算
以上の3点です。
まずは、A)からいきましょう。
A)回転体(円板など)の計算
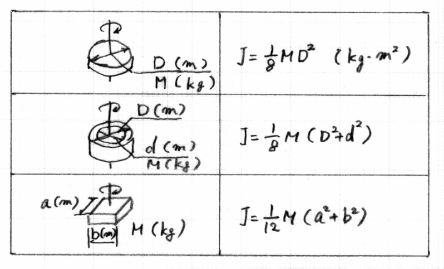
モーター選定に必要なものとしては上の3種類があれば、ほぼ事足りると思います。極論で言えば、一番上だけでも構いません。
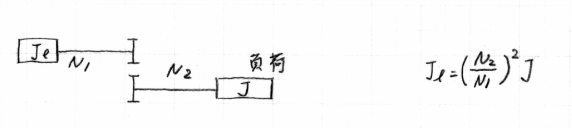
B)減速機を介した時の計算
減速機を介した時のモーター軸換算慣性モーメントは減速比の2乗で割ります。
例えば、1/5の減速機を入れた場合は5の2乗の25で割ります。
いま、モーター軸換算と書きましたが、駆動系の途中に歯車などで減速(増速)が掛かっている場合も同様になります。
C)移動部の慣性モーメントの計算
慣性モーメントを考える中で一番質量が大きいのがここになります。
計算するパターンで多いのが負荷をタイミングベルトやチェーンで引っ張って移動させる場合とボールネジなどで移動させる場合だと思います。
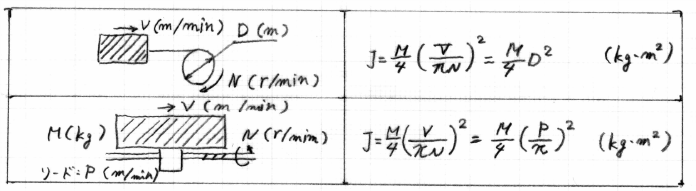
以上の3種類の計算について覚えておいてもらえれば十分と思います。
4.サーボモーターを選定する
それでは、実際にサーボモーターの選定をしていきます。
前回X軸のボールネジについて選定をしましたので、今回はそのモーターを選定していきます。
前回同様、この装置の概要と目標精度をおさらいしておきます。
| 装置名称 | ピックアンドプレースユニット | |
| 搬送対象 | ガラス | Φ63.5×Φ19.05×t1.0 W=0.008kg |
| 搬送速度 | X,Y共 | 250mm/s |
| 走行ストローク | X | 680㎜ |
| Y | 210㎜ | |
| Z | 20mm | |
| 位置決め精度 | X,Y共 | ±0.05mm/500mm |
他にも色々条件を整理しましたので、確認しておきます。
まずは、X軸走行部の質量
| 品番 | 品名 | 質量(kg) | 数量 | 小計(kg) |
| 1 | Y軸モーター(200W) | 0.8 | 1 | 0.8 |
| 2 | リニアガイドレール(580L) | 0.9 | 2 | 1.7 |
| 3 | Y軸ベース(A5052) | 2.5 | 1 | 2.5 |
| 4 | リニアガイド高さ調整ブロック | 0.5 | 2 | 1.0 |
| 5 | Y軸ビーム | 2.1 | 1 | 2.1 |
| 6 | チャック部 | 1.0 | 1 | 1.0 |
| 合計 | 9.1 |
これに、配管や配線等を加味して、2kg増しの11.1kgとしましたので、これで進めます。
加減速時間は0.2secとしました。
これらに加えて、前回決めたボールネジの型式と、カップリング、モーター型式を仮選定しておきます。
ボールネジ :BSS1505-900
カップリング :CPDW32-10-11
サーボモーター :200W – 3000rpm
定格トルク=0.637 N・m
最大トルク=2.23 N・m
モーター慣性モーメント=0.259 ×10-4 kg・m2 (JM)
モーター許容慣性モーメント比=15倍
各部の慣性モーメントを求めていきます。
まず、カタログに記載があるものは、それを使用します。
ここではカップリングがカタログに記載がありました。
カップリング :CPDW32-10-11
許容トルク=2.5 N・m
許容回転数=19000 rpm
慣性モーメント=0.096 ×10-4 kg・m2 (J2)
カタログでは慣性モーメントが×10-6 となっていますが、一般的に×10-4表記となっている機器類が多く、後々の計算中に桁を合わせる必要があるので先に合わせておきます。
次にボールネジの慣性モーメントを求めます。
ボールネジもメーカーに依りますがカタログ記載がある場合があります。
その時には計算は不要ですが、この型式には記載が無いので、計算をしていきます。
軸端があったり、谷の径の考慮などすると、計算が複雑になります。
工作機械などの大型機械では考慮する必要があるかとは思いますが、FA装置などでは考慮はしなくてよいと思います。
Φ15×900㎜(鉄系材料)として、
質量:1.24kg

移動部の慣性モーメントをまだ求めていないので、求めていきます。
移動部質量は前回、整理しました。11.1kgとして考えていきます。

以上で各部の慣性モーメントが求まりました。
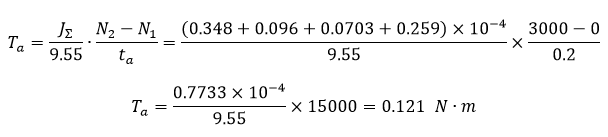
加速トルクを求めていきます。
加速時間も前回に0.2secとしました。
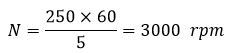
搬送速度は250㎜/s 、ボールネジのリードが5㎜ですので、その時のモーター回転数は下記の計算で3000 rmpとなります。
以上から、加速トルクはモーター定格トルクと比較して、十分に余裕がありますのでOKとします。
ここで、加速トルクが定格トルクの80%程度になると、慣性モーメント比のチェックを行います。
100%近く、又は少し超えるようなら慣性モーメント比のチェックと実効負荷トルクを求めて下さい。
この余裕だと、100Wのモーターでも良かったかもしれません。自身で一度検討してみてください。
今回はサーボモーターの選定を行いました。選定に必要な計算が多いですが、何度か経験すると手順を覚えられると思います。また、ダブルチェックや万一トラブルがあった場合に備えて計算過程(計算式→数値代入→計算結果)を残しておくとよいでしょう。サーボモーターの選定ミスは試運転時にならないと分からないので、注意してください。
次回はピックアンドプレースユニットのような装置には必ず必要な存在であるセンサーについて触れたいと思います。
それではまた。






