
前回は、移動の動力源となるサーボモーターの選定をしました。
モーターを使用して自動運転や半自動運転を行うにはセンサーが必要になります。今回は様々あるセンサーの中でも、走行部に使用されるセンサーについて見ていきましょう。
目次

1.センサーの種類
現在、私たちの身の回りにはセンサーが溢れています。
最近、リモートワークでテレビ会議することも多いと思いますが、このカメラの中もCMOSやCCDといったイメージセンサーが使用されています。
スマホには、タッチパネルや指紋認証があります。自動ドアの前に立つと、何もしなくてもドアが開いたり、公共施設の洗面台で手を出すと自動的に水が出たりするのも、センサーが機能しているからです。
以上のように、気づかないうちに日常的に様々なセンサーを利用しているわけですが、ここでは、機械装置で使用されるセンサーの中でも特に走行に使用されるセンサーについて見ていきたいと思います。
走行部に使用されるセンサーには、
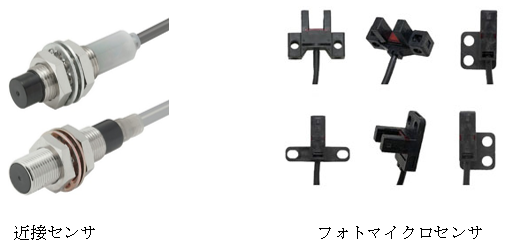
- 近接センサー(PR)
- リミットスイッチ(LS)
- フォトマイクロセンサ
が、多く使用されます。近接センサーは主に金属(磁性体)に反応する非接触型のセンサーです。検出距離、検出特性がカタログに記載されていますので、それを見て選定し設計します。検出距離についてはカタログ記載値より短く(80%程度)なるように設計しておくとよいでしょう。検出距離5mmの近接センサーなら、4mmで設計するという具合です。
リミットスイッチは接触型のスイッチとなっており、装置との接触部はプランジャやレバーなど色々ありますので、装置の設計に合わせて選定します。ブランジャやレバーが動くと、内部の電気接点が強制的に開閉する構造となっています。ですので、回路で確実に接点を開閉したい箇所で使用します。また、接触型の検出ですので、近接センサー等のセンサーより使用環境が悪いところでは誤検出が少ないので、そのような箇所でも使用されます。
フォトマイクロセンサは小型の透過型光電センサーです。とてもコンパクトになっているのが特徴で、単軸アクチュエータ―等によく使用されています。但し、基本構造は光電センサーなので、埃などには弱いです。使用環境が悪いところには向かないので、単軸アクチュエータ等をそのような環境で使用する場合には、別のセンサーにする必要があります。
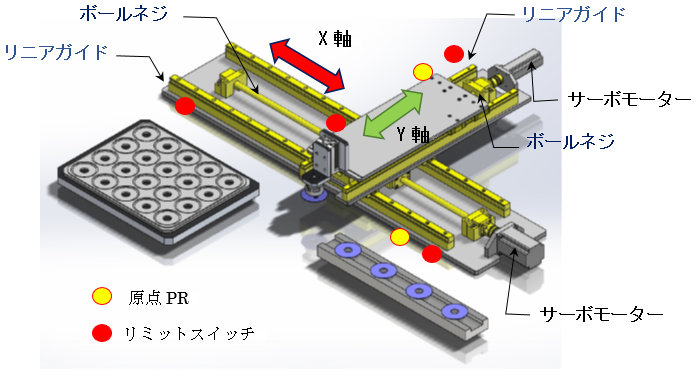
2.サーボモーター使用時のセンサー配置
続いて走行に使うセンサーの配置についてですが、まずサーボモーターを使う場合のセンサー配置について説明します。
サーボモーターは前回もお話しした通り、モーターがエンコーダーを持っており、出力軸の角度を検出することが出来ます。エンコーダーはA相、B相、C相(Z相)から構成されており、A相,B相で1回転内での角度を検出します。そして、C相は1回転に1回だけパルス出力があり、これを使用して、モーター原点を決定します。
サーボモーター使用時のセンサー配置
機械的には走行範囲においてモーターは何回転もするので、C相は何度も現れます。
その内の1回を機械原点として利用する目印として、原点検出PRを設置します。
原点検出PRの検出方法には2種類あります。
- パルスON方式
- ベタON方式
どちらが良くて、どちらが悪いということはありませんが、多く採用されているのはパルスON方式です。
ベタON方式は、パソコンNC(パソコンに高度なモーター制御システムを組み込みしたもの)に多く利用されています。これには工作機械の流れも影響があると思われます。
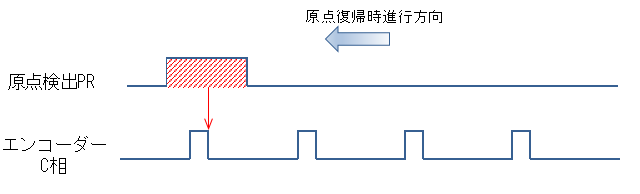
パルスONとベタONでは原点検出PRの使い方が違いますので、ドグの長さが変わってきます。パルスONでは原点検出PRの信号をパルスで発生させ、その信号が立ち下がり(切れる)後の1回目のC相を原点とするので、ドグはセンサーを一瞬横切ればOKです。従って、短いドグで構いません。
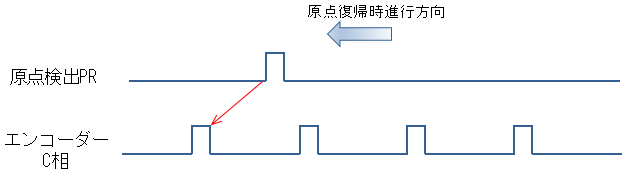
パルスON方式での原点復帰例
ベタONでは原点検出PRを検出している間にエンコーダーのC相を検出します。
従って、ドグはある程度の長さが必要になり、機械によって異なりますが、だいたいモーター1回転移動量の1/4程度の長さに設定します。
ベタON方式での原点復帰例
「機械原点は目に見えているが、エンコーダーC相がどこにあるか分からないのに原点検出PRを設置する位置なんて決められない!」と思う方も多いと思いますが、大丈夫です。今回はスペースの都合上省略しますが、ちゃんと分かる方法がありますので、センサー設置位置は機械原点からモーター1/5回転程度にしておくとよいです。
原点復帰が完了すると、サーボモーターの加速、減速、停止は上位の指令装置から送られる指令に従って動作します。
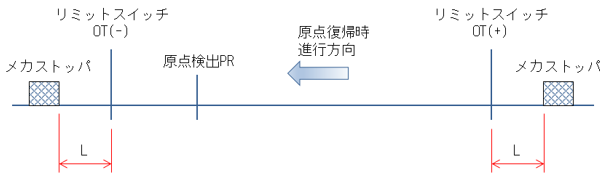
次にリミットスイッチですが、機械がオーバーランした時にモーターの動力(電気)を遮断し、機械を停止又はメカストッパに衝突してもダメージを小さくする為に設置します。
リミットスイッチは機械的に電気接点を開く(乖離する)ものを使用することが望ましいです。
リミットスイッチの接点はb接点(常時閉)で使用します。この状態で接点融着等がおきた場合、近接センサーなどでは接点を開くすべがありません。確実な動力の遮断が必要となるところなので、強制乖離可能なものが望ましいです。
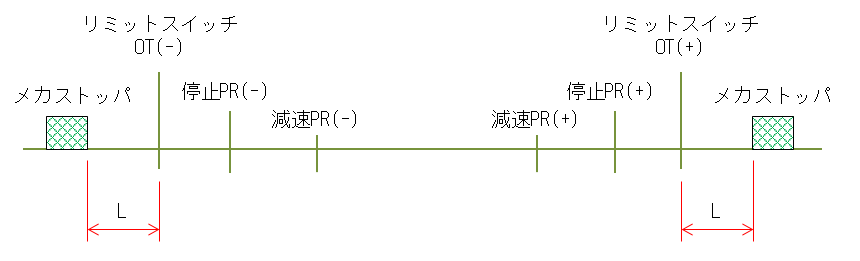
リミットスイッチの設置位置は、メカストッパよりモーター2回転分以上の距離でリミットスイッチが作動(接点が開く)する位置に設置します(センサー配置図のL寸法)。ラックピニオン駆動の場合はモーター動力遮断後、惰性で動くことも多く、メカストッパにぶつかりますが、動力遮断していない場合よりも被害は少ないので、決して省略しないでください。
3.インダクションモーター使用時のセンサー配置
インダクションモーターはサーボモーターと異なりエンコーダーを持たないので、停止位置は停止PRの位置で決めていきます。
エンコーダーよりも停止精度が悪くなりますので、その点を頭に入れておくことが必要です。リミットスイッチについてはサーボモーターと同様にメカストッパよりモーター2回転分以上の距離に設置します。
ただし、サーボモーターの時と異なるのは、走行部がメカストッパに衝突した状態で、リミットスイッチが作動している状態にしておく必要があることです。これには、インダクションモーターの使用時のセンサーを制御しているのがPLCであることが関与しています。
次に、センサーの検出タイミングについてもう少し詳しく見ていきます。
前述のようにインダクションモーターはエンコーダーを持たない為、現在位置を把握することが出来ません。そのため減速開始位置と停止位置を、それぞれセンサーで教示する必要があります。検出タイミングは下図のようになります。
インダクションモーター使用時のセンサー配置
減速(PR)、停止(PR)、オーバートラベル(LS)がセンサーのセットになります。
それぞれの検出タイミングは必ずオーバーラップさせて下さい。インダクションモーターの制御では“センサーが何も検知していない”=“高速運転”となります。
例えば、減速と停止の間に何もセンサーが検出していない区間が存在すると、モーターはそこで一度加速してしまいます。
また、運転速度、減速時間によってドグの長さも変わってきます。設計条件(速度、減速時間)から適切なドグの長さにしてください。
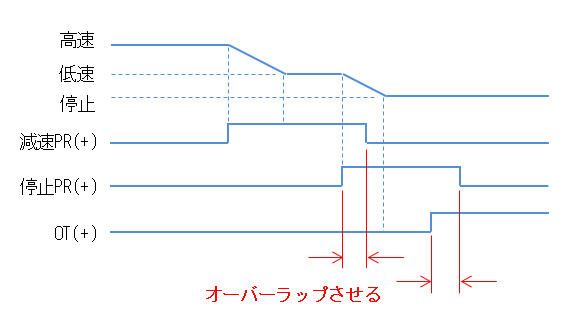
インダクションモーター使用時のセンサー検出タイミング
4.センサーの配線について(接続先)
サーボモーターの原点PRとリミットスイッチ(サーボのマニュアルではOTと表記されていることが多い)の配線は、PLCを介せず直接サーボドライバ(アンプ)に接続します。
これは、PLC経由で配線していた場合にPLCが異常(故障等)を起こした場合でも、モーターの重要なセンサー配線は影響を受けないようにする為です。
サーボ系以外にも近接センサーや光電センサーなど、装置の中には色々なセンサーが使用されますが、サーボ系とそれ以外では配線先が違いますので、注意が必要です。特にリモートI/O(CC-Link , Device-NET等)使用時に注意が必要です。サーボ系は他の入出力配線とは別配線となりますので、ケーブルベア等にはその分のスペースを確保しておいてください。
これまで6回に分けてピックアンドプレースユニットの主要な構成要素を見てきました。
この6回で装置は形になり、動かせる状態になっています。
次回は、意図した動作となるようにタイムチャートの書き方について考えていきます。
それではまた。






