
今回も「こんなときどうする?」といった課題解決をテーマに、各事例に応じた装置を使って考えていきたいと思います。
前回はボールネジを使用した搬送装置で、「移動速度を2倍にしたい」という場合を考えました。
今回は、ボールネジを使用した搬送装置で、「搬送姿勢が変わった」という場合を考えてみましょう。
【図1】はメカチャックを使用した搬送装置で、床面からワークを拾い上げ、棚に収める動作を行う装置です。倉庫内で使用されるような装置のイメージになります。
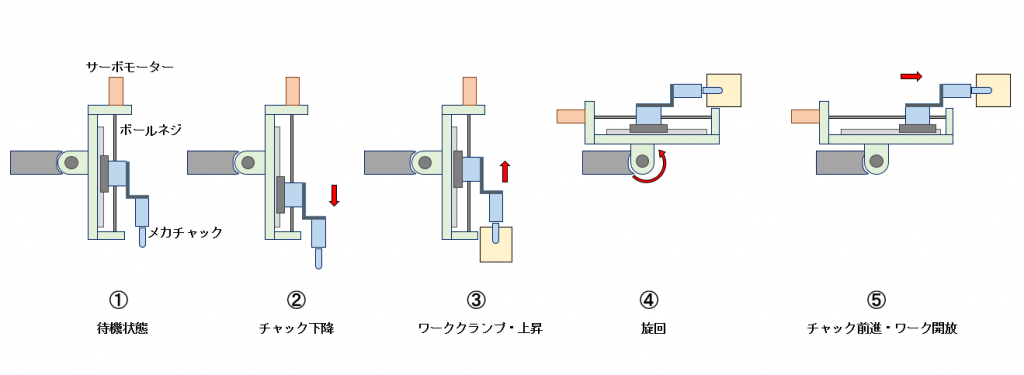
【図1】搬送姿勢が変化するピックアンドプレースユニット
この装置では、メカチャックに昇降と前進・後退という動きが出てきます。ワークへの負荷の有無の違いもありますが、姿勢の違いにより、モーター負荷が変化してきます。
もし、⑤の姿勢でモーター選定を行っていた場合、③の姿勢ではどうなるでしょうか?今回はそのようなケースを考えてみたいと思います。
【表1】装置基本仕様
| 装置名称 | ピックアンドプレースユニット | |
| 搬送対象 | W=5kg | |
| 搬送速度 | 500mm/s | |
| 加減速時間 | 0.2 sec | |
| 走行ストローク | 300㎜ | |
| ボールネジ | Φ15 / リード10 mm / 長さ900 mm | |
| サーボモーター | 容量 | 50 w |
| 定格回転数 | 3000 min-1 | |
| 定格トルク | 0.16 N・m | |
| 最大トルク | 0.56 N・m | |
| モーター慣性モーメント | 0.045×10-4 kg・m2 | |
| モーター許容慣性モーメント比 | 17倍以下 | |
| カップリング | 型式 | CPSW25-8-10(ミスミ) |
| 許容トルク | 1.0 N・m | |
| 慣性モーメント | 0.027 ×10-4 kg・m2 | |
| 位置決め精度 | X,Y共 | ±0.05mm/500mm |
必要事項は以上です。
それでは、考えていきましょう。
目次

1.水平時の負荷トルク・加速トルクの確認(状況整理)
まず、「水平時の運転条件でモーター選定をしてしまった。」という状況から、この状態での負荷トルク、加速トルクに問題が無いか確認していきます。
きちんと設計検討資料(計算書)が残っていれば、そちらを参照すれば済む話ですが、こういう時に限って資料が無い、解読に多大な時間を必要とする、というのが、よくあります。
とにかく、現状把握することが必要ですので、確認していきましょう。
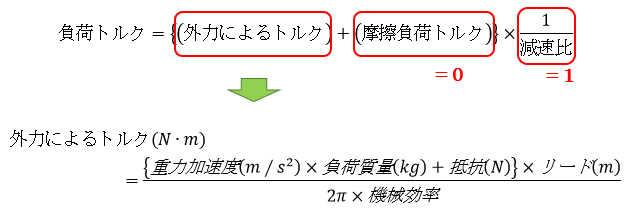
負荷トルクは前回も計算をしましたが、次の式のようになります。今回は減速機を使用していませんので、減速比は1となります。また、搬送装置ですのでワークに対して外力も働きません。

したがって、摩擦負荷トルクのみを考えれば良いことになります。
摩擦負荷トルクを求めていきます。

今回の条件を当てはめていきます。ガイドはリニアガイドを使用していますので、摩擦係数は0.003とします。

これが負荷トルクとなります。
![]()
次に、加速トルクを求めていきます。
加速トルクは前回にも出ていますが、次の式で求められます。負荷トルクは上で求めていますので、加速度に見合うトルクを求めていきたいと思います。
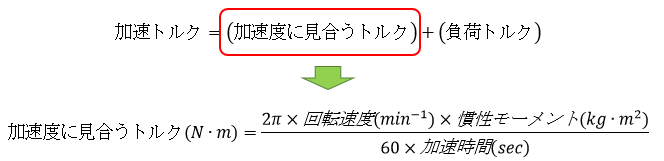
各部の慣性モーメントが必要になるので、求めていきます。計算式については前回を参照してください。
【表2】各部の慣性モーメント
| 番号 | 名称 | 慣性モーメント
(×10-4 kg・m2) |
| ① | 移動部分 | 0.126 |
| ② | ボールネジ | 0.348 |
| ③ | カップリング | 0.027 |
| ④ | モーター | 0.045 |
| 合計 | 0.546 |
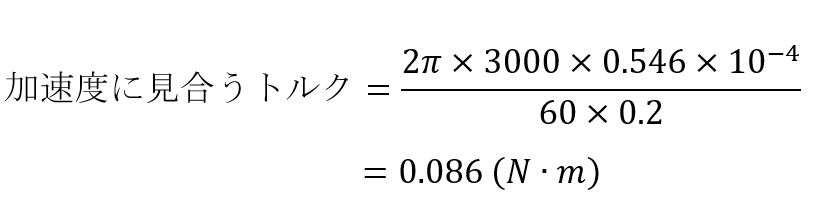
これで計算に必要な値は揃いましたので、加速度に見合うトルクを求めましょう。
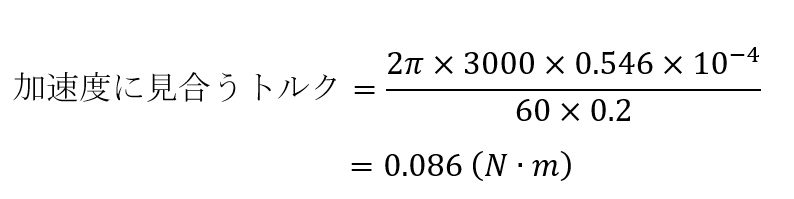
したがって、加速トルクは、
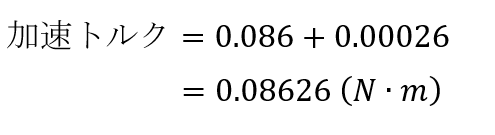
加速トルクにおいて負荷トルクの占める割合は小さいので、ゼロとして計算を省略しても良かったですね。水平搬送でリニアガイド使用、外力の影響なしの場合は省略してもよいでしょう。
2.垂直時の負荷トルク・加速トルクの確認(問題抽出)
水平の時と同様に、垂直の時の負荷トルク・加速トルクの確認をしていきます。
まず、負荷トルクから見ていきましょう。垂直時には重力の影響を受けます。また、リニアガイドの姿勢が垂直になりますので、ガイドの摩擦力の元になる垂直抗力は働きません。
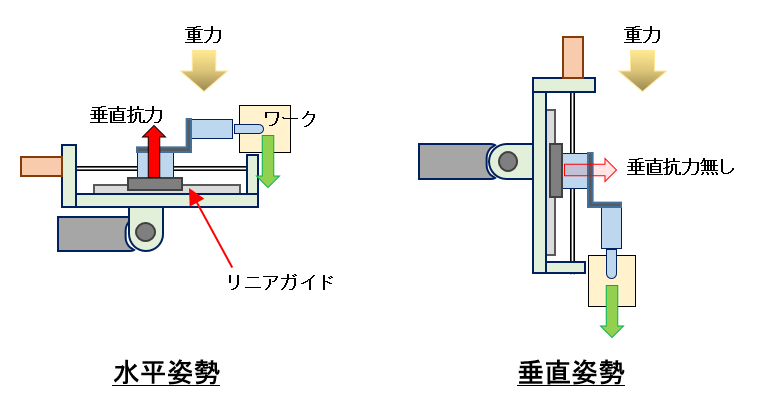
【図2】取付姿勢とリニアガイドに掛かる力の違い
したがって、負荷トルクは外力(重力)による負荷のみを考えていきます。
計算すると、

これが負荷トルクとなります。
![]()
次に、加速トルクを求めていきます。
加速トルクの内、「加速度に見合うトルク」には重力や外力に関する要素が含まれていません。
したがって、ここは水平時と同じ値になります。
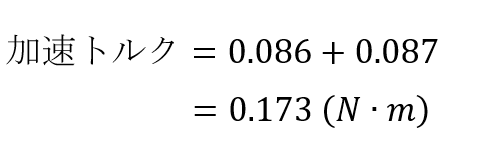
したがって、加速トルクは、
以上で、水平時、垂直時の負荷トルク、加速トルクが求まりました。ここまでの計算を整理しておくと、【表3】のようになります。
【表3】水平姿勢と垂直姿勢でのトルクの比較
| 負荷トルク(N・m) | 加速トルク(N・m) | |||||
| 外力によるトルク | 摩擦負荷トルク | 合計 | 加速度に見合うトルク | 負荷トルク | 合計 | |
| 水平姿勢 | 0 | 0.00026 | 0.00026 | 0.086 | 0.00026 | 0.08626 |
| 垂直姿勢 | 0.087 | 0 | 0.087 | 0.086 | 0.087 | 0.173 |
水平姿勢時と垂直姿勢時では、負荷トルクの差が大きく出ることがわかると思います。
垂直姿勢ではサーボモーターは負荷(ワーク)を吊っているだけでもトルクが必要であり、それだけの仕事をしています。これは実効負荷トルクに効いてくる要素となります。
実効負荷トルクについては第5回でもちょっとだけ触れています。
加速トルクも負荷トルクの差の影響を受けています。ただし、こちらは加速度に見合うトルクが負荷トルクに比べて大きいため、合計での差(倍率)は小さくなっています。
3. モーターの選定
それでは、この装置に適したモーター容量を見ていきたいと思います。
表1で今回選定したモーターを記載していますが、垂直姿勢での加速トルク(表3)と定格トルクを比較すると、モーター定格トルクが加速トルクを下回っています。
モーター最大トルクは加速トルク以上となっていますが、設計段階では目安として加速トルクがモーター定格トルクの 80% 以内となるようにしておきましょう。
組み立てをしていくと、配線や配管、電磁弁等の取り付けがあり、設計時の想定より負荷質量が大きくなることがあります。使用条件の変化により摩擦負荷が少しぐらい大きくなっても装置を止めないようにするためです。
それでは、モーターの選定をしていきます。
モーター選定に必要な計算は済んでいますので、ここからはモーターの仕様と比較していきます。現在の50wではトルクが不足していることはわかっているので、100wと比較していきます。
【表4】サーボモーター仕様表
| 容量 (w) | 50 | 100 |
| 定格回転数(min-1) | 3000 | |
| 定格トルク(N・m) | 0.16 | 0.32 |
| 最大トルク(N・m) | 0.56 | 1.1 |
| モーター慣性モーメント
(×10-4 kg・m2) |
0.045 | 0.0777 |
| モーター許容慣性モーメント比 | 17倍以下 | |
表3のところで垂直姿勢時の加速トルクは0.173 N・mということがわかりました。モーター定格トルクがどれだけあればいいかを考えてみましょう。
モーター定格トルクは0.216 N・m以上あればよいということがわかりました。
100wのモーター定格トルクは0.32 N・mであるので、トルクの条件は満たします。
次に、慣性モーメント比を確認しておきます。
モーター定格トルクの 80% 以内に収まっているので、心配は少ないですが念のため確認しておきましょう。
表2でモーター変更前(50w)での慣性モーメントの合計を求めています。
ここからモーターを変更していますので、その分だけ修正していきます。


モーター許容慣性モーメント比を確認していきます。
表4のところで、モーター許容慣性モーメント比は17倍以下であることがわかっていますので、十分許容値内に収まっていることがわかります。
4.まとめ
以上の事から運転中に搬送姿勢が変化する場合や、装置改造等により搬送姿勢を変更する場合は次のことに注意しなければなりません。
- モーターの負荷が一番高くなる状態がどこか確認する。
- 負荷が高くなる状態でモーター容量の検討を行う。
- 姿勢変更による強度や剛性の変化についても確認・検討を行う。
装置の姿勢が変化するということは「別の装置を作っていることと同じ」と言ってもいいでしょう。
また、今回の例に出した装置では、水平から垂直に姿勢を変更する旋回軸の負荷もかなり大きくなります。設計する上で、装置の動作をイメージして検討することが大切です。
次回は、同じようにボールネジを使用した搬送装置で、ボールネジの回転速度を変更した場合について考えていきます。ボールネジの使用時に必ず確認すべきことです。ぜひ読んでみてください。
それではまた。






