今回から始まる新シリーズ「山田学の設計の勘どころ」は、これまでとは違う視点で機構設計を捉え直す試みです。
テーマは、
柔能制剛
~しなやかなものは弱そうに見えても、堅いものをうまくそらして勝つことができる~
設計では「剛性を上げる」「精度を詰める」ことに目が向きがちですが、現実の機構はばらつき、慣性、遅れ、ガタといった“思い通りにならない要素”を必ず抱えています。
それらを力で押さえ込もうとするのではなく、特性を理解し、逃がし、受け流す――そのための勘どころを整理していきます。
シリーズでは、まず四節リンクにフォーカスを当てて次の順番で進めていきます。
第1回:アクチュエータの特徴と注意点
第2回:センサの特徴と注意点
第3回:四節リンク(揺動運動)の特徴と注意点
第4回:四節リンク(回転運動)の特徴と注意点
第5回:四節リンク(スライド運動)の特徴と注意点
第6回:四節リンク(カム機構)の特徴と注意点
まずは「動かす」「判断する」要素であるアクチュエータとセンサの特性を押さえ、その上で四節リンク機構を運動ごとに見ていきます。
柔らかく考えることで、結果として強い設計になる――そんな話を、実体験を交えながら進めていきましょう。
目次
はじめに
今回、新たに開始する「設計の勘どころ」シリーズは従来の製図の作法から離れて、機構設計する際のコツや注意点を紹介していきます。
筆者は製造業で研究所、設計部、品質保証部と開発の上流から下流までを経験してきました。これらの実務経験を通して、設計の本質は何かと問われたときに次の2つのキーワードを知って設計することであると考えています。
➀基準を明確にすること
CAD上では中心線基準で部品が配置されて理想的な組立状態になっていますが、現実の組立においては穴とボルトの隙間分、横ずれや縦ずれ、傾きが生じます。そうなると他部品との干渉や機能が発揮できなくなる可能性が高くなります。
部品の位置決めを面当てにするのか基準穴にするのかを設計思想に入れておく必要があります。
②ゼロゼロの関係を狙わないこと
➀項の基準から派生する内容ですが、基準面(または基準穴)に対して、その他の部位はばらつきを考慮して隙間をあけるなど逃がす構造が必要です。つまり「基準面と対向する面のどちらも隙間なく当てたい」という場面では調整式に設計しなければいけないのです。
同様にリンク機構では「この位置ピッタリで停止させたい」という場面も出てきます。一般論として停止センサを使えば狙いの位置で止められるだろうと思いがちですが、センサ取付位置のばらつきやリンク系のガタつき、ソフトによる停止命令の遅れ、モータや機構系のイナーシャ(慣性モーメント)によるオーバーランなど、設計者が期待する位置で停止させることは至難の業になります。
「設計の勘どころ」シリーズでは、上記の事項に留意しながら「四節リンク機構の勘どころ」に着目して解説していきます。
まずは、動力源であるアクチュエータや制御の元となるセンサの注意点を解説した後、代表的な四節リンクの種類や注意点を全6回に渡って解説していきます。
1)メカトロとリンク機構
メカトロニクスとは、メカニクス(mechanics:機械工学)とエレクトロニクス(electronics:電子工学)の合成語で和製英語になります。
メカトロニクスを利用した機構設計において、アクチュエータやセンサを組み合わせて動作させるため、電気設計者やソフト設計者と意思疎通しながら設計を進めなければいけません。
本記事ではリンク機構の動力源となるアクチュエータの一種、DCモータの特徴と注意点を解説します。
2)アクチュエータの種類
アクチュエータとは、入力された電気や油空圧のエネルギーを物理的な運動へ変換する機械要素です。
アクチュエータには、次のような種類があります。
- 電気による駆動・・・電気モータ、電磁ソレノイド、ピエゾ素子など
- 流体による駆動・・・油圧シリンダ、油圧モータ、空圧シリンダ、空圧モータなど
- 温度変化による駆動・・・形状記憶合金など
コピー機などに代表される産業機械に使用されるアクチュエータは、電気モータや電磁ソレノイドが一般的に使われます。
電気モータの種類の中でもリンク機構によく使われるのがDC(Direct Current:直流)モータです。
3)DCモータの特徴
DCモータとは、駆動電源に直流を用い、固定子(ステータ)に永久磁石を、回転子(ロータ)にコイルを構成し、電機子(アーマチュア)に電流を流して回転モーメントを発生させるものです(図1-1)。

図1-1 DCモータの構造例
DCモータのうちブラシ付きモータの特徴を列記します。
- 起動トルクが大きく、急な加速性に優れる
- 回転特性が直線性を持ち、特性把握が容易である
- 低価格である
- ブラシと整流子(コミュテータ)の接触による騒音やノイズ、寿命の問題がある
DCモータに歯車の減速機を一体化した機械要素をギヤードモータと呼びます。
DCモータ単品では高速回転・低トルクのため使い勝手が悪くなります。そこで減速機を一体化することにより高トルク化、低回転数化を図り、安価で制御しやすいアクチュエータにしたものです(図1-2)。


図1-2ギヤードモータの例
用途によって様々な種類のギヤードモータを選定することができます。同一形状でもモータの特性や減速比を変更することで、トルクと回転数を変えたものがシリーズ化されている場合もあります。
必要トルクと回転数、使用環境、レイアウト上の制約などを考慮して最適なモータを選定します。
4)DCモータの特性図を知る
モータ特性図を知らずにメカトロ製品の設計はできません。
モータ特性図とはモータの性能をグラフ上に示した線図をいい、性能曲線図とも呼びます。
トルクを横軸に電流と回転数を縦軸に表したグラフを用いることで、「トルクと電流の関係(T-I特性)」と「トルクと回転数の関係(T-N特性)」を読み取ります(図1-3)。

図1-3モータ特性図
図1-3から、次のことが読み取れます。
- T-N特性からトルクと回転数は直線的に反比例する(トルクが大きくなるほど回転数が下がる)
- T-N特性は電圧Eによって変動し、電圧が高いほど同じ回転数でも大きなトルクを発する
- T-I特性から、トルクと電流は直線的に比例する(トルクが大きくなるほど電流が大きくなる)
- T-I特性は、電圧Eに依存しない
記号の意味を知ろう!
モータ特性図に出てくるアルファベットの意味を知りましょう。
・T(トルク)…Torqueの頭文字
・I(電流)…Intensity of Current(電流の強さ)の頭文字
・N(回転数)…Number of rotationの頭文字
5)DCモータの特性図を読む
実際にモータ特性図の意味を理解しましょう(図1-4)。
各ポイントの名称を列記します。
➀定格トルク(モータの仕様書に記載)
②定格トルク時の電流値(モータの仕様書に記載)
③定格トルク時の回転数(モータの仕様書に記載)
❶無負荷回転時の電流値
❷無負荷回転時の回転数
❸起動トルク(最大トルク、停動トルクともいう)
❹起動電流(最大電流、停動電流ともいう)
リンク機構を設計するとき、リンクが連続的に動作するとき(定常状態という)の負荷は定格トルク➀より小さい連続運転可能領域(赤色のハッチング部)内に収まるように設計しなければいけません。
定格トルクとは、連続して回転しても温度上昇などが規格以内に収まりモータメーカーが保証するトルクをいいます。30分定格などと時間制限をうたう場合もあります。
定格トルク以上の負荷を長時間かけると、内部の温度が設計値以上になり、絶縁劣化・過熱発火などにつながります。
リンク機構が動作し始める時、静止摩擦によって瞬間的に大きな電流が流れますが、可動領域(青色部)内であればモータは動き始めます。設計したリンク機構の負荷が大きく、モータの起動トルク❸を超える場合はリンク機構を動かすことはできません。モータを高出力タイプに変更するか減速比を大きくして高トルク化しなければいけません。

図1-4 モータ特性図の読み方
DCモータを採用した設計の勘どころ
負荷を推定せずにリンク機構の設計を始めることはできません。
リンク機構の定常状態のトルクが定格トルク以下になるよう設計します。
設計を始める前にリンクの機械効率も考慮して負荷トルクを推定するか、類似のリンク機構がある場合は実験によって負荷トルクを求め、それを参考にするなど目途を立ててアクチュエータを選定します。
計算や実験によって誤差が出るのは仕方ありません。もし負荷オーバーが発覚した場合の対策(代替アクチュエータの存在や軽量化、軸受種類の変更など)まで考慮しておくとよいでしょう。
6)モータ負荷の検証
機構の負荷トルクを計測する場合、モータ電流値を測定するのが一般的です。
電流プローブを介してオシロスコープなどを用いて動作時の電流値を測定します(図1-5)。

図1-5 モータ負荷の測定例
リンク機構を動作した際のモータの電流波形データと採取します(図1-6)。
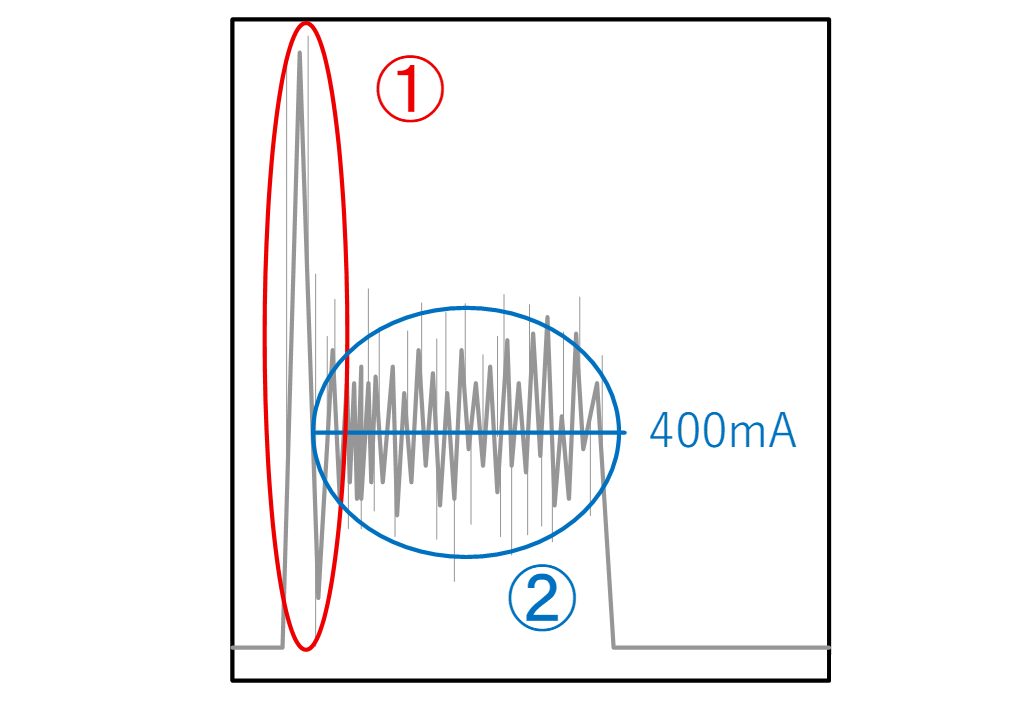
図1-6 モータ電流波形の例
➀最大静止摩擦から動摩擦に切り替わるまでの高負荷領域です。
⇒瞬間なので定格トルクを超えても問題にならない場合がありますが、起動トルクを超えるような大きな負荷の場合はリンク機構を動かすことはできません。
②動摩擦領域に入り、安定して機構が動作している状態です。ノイズにより波形が暴れていますが、平均と思われる部分に線を引き、平均電流値を求めます。
⇒安全率を考慮するので、読み取り誤差の心配は不要です。
仕様書あるいはカタログスペックからモータ特性図を準備します(図1-7)。

図1-7 モータ負荷の検証例
例えば定格トルクが50N-cmである場合、図1-6から求めた平均電流値(400mA)を特性曲線と照らし合わせて次の事項を確認します。
- 定格電流を超えていないかを確認する→定格電流700mA以下のためOK!
- 実際のリンク機構の負荷を知る→実電流400mAより実負荷トルクは29N-cmである
- 実際の回転数を知る→実負荷トルクのときの回転数は155rpmと定格回転数140rpmより少し早い
DCモータを採用した設計の勘どころ
下記の点に注意して安全率を考慮しなければいけません。
・試作品のサンプル数が少ない場合、量産時の機差ばらつきが考えられること
・常温でモータ負荷を測定しますが、低温環境ではモータ出力低下、リンク部に塗布したグリースの粘性増大、ゴム部品の硬化などで負荷が増加すると想定される
定格トルクに対する安全率を例えば1.5と設定した場合、
となります。
今回の測定トルクが29(N-cm)であるため、定格トルクに安全率1.5の値を下回っているため量産時の機差ばらつきや低温環境でも問題なく動作できるであろうと判断します。
また、設計当初は定格回転数を用いてリンクの動作速度を検討しますが、実際の負荷は定格トルク以下になるため、モータ回転数は若干高くなりリンク動作速度は計算値より速くなります。リンク動作が早くなるため必要に応じてソフト上の監視タイマー値を補正するなどを検討します。
まとめ
アクチュエータとは、入力された電気や油空圧のエネルギーを物理的な運動へ変換する機械要素であることがわかりました。
アクチュエータのうちDCモータは起動トルクが大きく安価であることから多用されることも知りました。
DCモータを使用してリンク機構を設計する場合に、モータ特性図を確認し、定格トルクを下回ること、機差ばらつきや低温環境を想定した安全率を含めて満足するようにシステム設計しなければいけないことも知りました。
次回は位置決めなどを制御するセンサの種類と注意点を解説します。




